[C++] A C++17 Statemachine using std::tuple and std::variant
Find this example herer on compiler explorer.
One of my favorite design patterns is the state machine pattern. You can trigger certain function when you enter or leave a state and can run different update methods depending on its state, just like illustrated bellow:
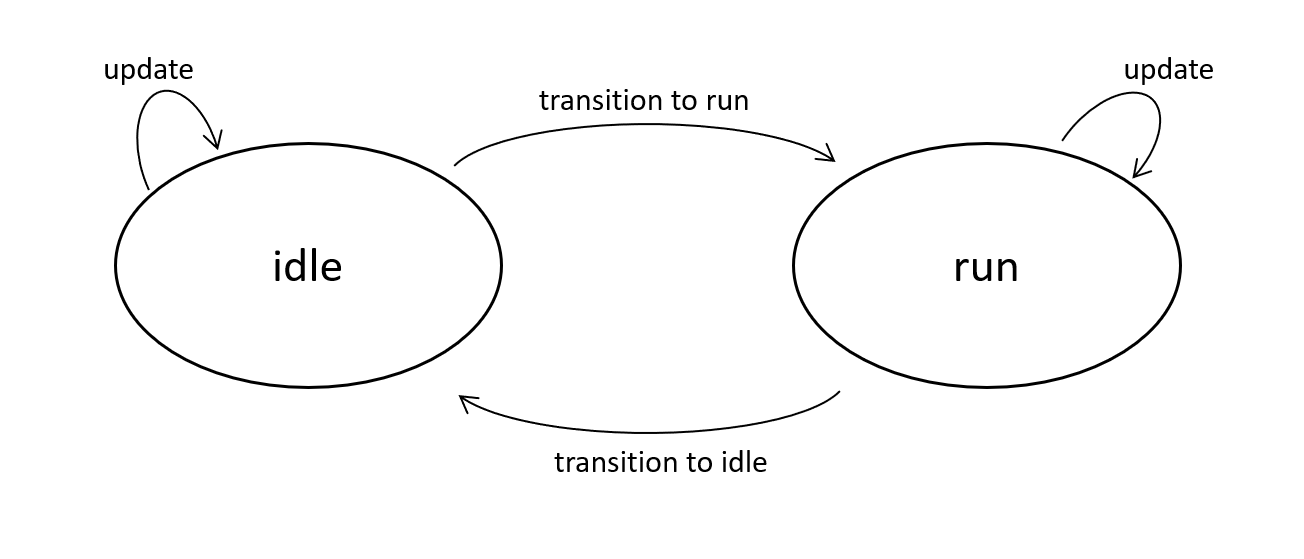
A simple statemachine with two states, where each states runs it’s own update method and transitions.
And then I used to write a statemachine like this:
#include <iostream>
#include <memory>
// an abstract state which holds on_update which we want to call
struct state
{
virtual ~state() = default;
virtual void on_update() = 0;
};
// two specific states where we implement our functions which
// we want to when we enter, leave and update the state
struct idle : public state
{
idle(){
std::cout << "entering idle \n";
}
~idle(){
std::cout << "leaving idle \n";
}
void on_update() override {
std::cout << "still waiting \n";
}
};
struct run : public state
{
run(){
std::cout << "entering run \n";
}
~run(){
std::cout << "leaving run \n";
}
void on_update() override {
std::cout << "we are running! \n";
}
};
// a statemachine which holds the states and whenever certain conditions
// are fullfilled we can set a new state here with set_state
class state_machine
{
private:
// set the initial state to idle
std::unique_ptr<state> m_state = std::make_unique<idle>();
public:
void set_state(std::unique_ptr<state> next) {
m_state = std::move(next);
}
void on_update(){
m_state->on_update();
}
};
int main()
{
state_machine machine;
// update a couple of times
machine.on_update();
machine.on_update();
machine.on_update();
// something happened, we want to change the state to run
machine.set_state(std::make_unique<run>());
// update a couple of times
machine.on_update();
machine.on_update();
machine.on_update();
return 0;
}What I don't like here and what we can do better
Basically this isn't too bad and if you're looking at other languages, like Java, I think this is the way the pattern suggests (maybe there are modern, different approaches in Java, I don't know and I'm not a Java developer).
But:
- Things can go out of hand here when you have plenty of states
- Maybe, depending where you create the states we'd need to seperate headers and bodies
- Dynamic state allocation with
std::unique_ptr<state>, we know all states at compile time
Let's create a new statemachine
When I started thinking about a new approach, it was something with templates, because we actually know all states at compile time. I had some ideas and found this article online. Ultimately I modified this statemachine a bit, where I'm happy now with.
Let's introduce std::tuple and std::variant and create a state machine. If you're not familiar with tuples, you can check out my article: Tuples From Scratch. In short:
std::tupleis like a list which holds all given typesstd::variantis like a union where we can assign one value to it, which can be of different types
template <typename... States>
class state_machine
{
private:
// the tuple m_states holds all states we'll define
std::tuple<States...> m_states;
// in this variant we hold a reference to the current state, it's initialized by the state at index 0
std::variant<States*...> m_current_state{ &std::get<0>(m_states) };
public:
// we can change a state by calling set state with a state type
template <typename State>
void set_state() {
m_current_state = &std::get<State>(m_states);
}
// we can define certain events which call a dedicated state transition
template <typename Event>
void on_state_transition(const Event& event)
{
auto execute_on_call = [this, &event] (auto current_state) {
current_state->on_state_transition(event).execute(*this);
};
// std::visit "visits" the current_state and calls the lambda with the current state
// this means every possible state needs to implement the execute function inside the lambda
std::visit(execute_on_call, m_current_state);
}
// we call on_update of each state also with std::visit like above
void on_update()
{
auto execute_on_call = [this] (auto current_state) {
current_state->on_update();
};
std::visit(execute_on_call, m_current_state);
}
};
The state transitions
Since we introduced on_state_transition() as template in our state machine, we need to define state transitions types:
// the state transition type, where the template represents the target state
template <typename State>
struct state_transition_to
{
// on execute we're setting the target state in our statemachine by calling execute()
template <typename Statemachine>
void execute(Statemachine& statemachine) {
statemachine.template set_state<State>();
}
};
// an invalid state transition which has an emptye execute() function
// we need this (guess what) for all transitions we wont support
struct invalid_state_transition
{
template <typename Machine>
void execute(Machine&) { }
};
// specific state transition types we support
struct transition_to_run{};
struct transition_to_idle{};The states
And also we need to define the state types in which our state machine can be:
// state definitions
struct idle;
struct run;
struct any_other_state;
// idle state which implements the methods to call by the statemachine
struct idle
{
// regular on update call
void on_update() const {
std::cout << "still waiting \n";
}
// specific transition to run, where we return the concrete state transition to run
// to distinguish different state transitions, we use an empty function argument here
state_transition_to<run> on_state_transition(const transition_to_run&) const{
std::cout << "leaving idle with transition to run \n";
return {};
}
// a template function to indicate all non supported state transitions.
template<typename Transition>
invalid_state_transition on_state_transition(const Transition&) const {
std::cout << "state transition: " << typeid(Transition).name() << " is not supported in idle! \n";
return {};
}
};
// the same for our run state
struct run
{
void on_update() const {
std::cout << "we are running! \n";
}
state_transition_to<idle> on_state_transition(const transition_to_idle&) const {
std::cout << "leaving run with transition to idle \n";
return {};
}
template<typename Transition>
invalid_state_transition on_state_transition(const Transition&) const {
std::cout << "state transition: " << typeid(Transition).name() << " is not supported in run! \n";
return {};
}
};Let's use this statemachine
Now we're done and can use this state machine. This is almost the same behaviour as with the previous one we had. There is a bit of a difference with entering and leaving the states, but on the contrary we have certain state transitions where we can implement some functionality. And:
- There's no dynamic allocation and runtime polymorphism and we got rid of
std::unique_ptr<states>here - The states are types and were all stored initially in the tuple
- Switching states just changes the referens in the variant and doesn't create a new state on every change
- All state transitions are empty types this doesn't cost much at runtime
// the alias for our state machine with state idle and run
// the statemachin is initialized with idle
using example_state_machine = state_machine<idle, run>;
int main()
{
example_state_machine machine;
// update a couple of times in idle
machine.on_update();
machine.on_update();
machine.on_update();
// something happende, we change state to run
machine.on_state_transition(transition_to_run{});
// update a couple of times in run
machine.on_update();
machine.on_update();
machine.on_update();
// just for demonstration here
// call a invalid state transition
machine.on_state_transition(transition_to_run{});
machine.on_state_transition(transition_to_run{});
return 0;
}If we wouldn't use a templated invalid state transition function...
... then we have to implement all possible state transitions. This is from my point of view a bit overwhelming and a lot of overhead. The number of statetransition is then n with n=states.
Inside the invalid state transition, you could throw a compiletime error or maybe SFINAE it out. But this is not in the scope of this article and I just illustrate the invalid state with a print to the terminal.
To illustrate the overhead just take a look at this arbitrary state and then imagine you'd have many more ...
// a defined state transition to any state
struct any_other_transition{};
// ...
// any defined state
struct any_state;
// ...
// the implementation of any state
struct any_state
{
// updating any state here
void on_update() const {
}
// transition to idle
state_transition_to<idle> on_state_transition(const transition_to_idle&) const {
return {};
}
// invalid transition to run (just as an example, this would be invalid)
invalid_state_transition on_state_transition(const transition_to_run&) const{
return {};
}
// invalid transition to itself
invalid_state_transition on_state_transition(const any_other_transition&) const{
return {};
}
// and a lot of other states would follow....
};
Conclusion
Find this example herer on compiler explorer.
I really like this approach of a state machine, like i pointed out the advantages of it in this article. Feel free and play around with.
That's it for now.
Best Thomas